Nozioni Reti CAN
Introduzione alla Linea CAN e al Body Computer
Come nasce
L’idea di partenza è semplice e, come ogni cosa che riguardi l’ingegneria industriale, dettata più da esigenze economiche che tecniche: la condivisione delle informazioni.
Cosa significa questo? Facciamo un esempio, in un veicolo non dotato di sistema CAN la centralina ABS utilizza 4 sensori (uno per ogni ruota) per misurare la velocità delle ruote, la centralina di iniezione utilizza un sensore di velocità solitamente posizionato sul cambio per controllare la velocità del veicolo. Risultato: 5 sensori, 5 cablaggi.
In un autoveicolo dotato di linea CAN la centralina ABS calcola la velocità del veicolo e la comunica al body computer il quale distribuisce questa informazione a tutte le centraline che richiedono questa informazione (Centralina gestione motore, cruscotto, sistema di climatizzazione, sistema satellitare, ecc.) in questo modo si hanno 4 sensori e 4 cablaggi (quelli dell’ABS), mentre ciascuna centralina riceve l’informazione che gli serve.
Lo stesso vale per tutti i vari segnali, ad es. il numero di giri è rilevato dalla centralina gestione motore e comunicato al cruscotto e alle altre centraline che avessero bisogno di questa informazione.
Questo sistema fu inizialmente denominato VENICE:
Vehicle Network Integration Component Electronics
Nascita del sistema CAN
-Nel 1987 Intel, in collaborazione con Bosch, realizzò il primo chip per reti CAN chiamato (82256).
-Nel 1991 l’Istituto Superiore di Omologazione (ISO) approva il protocollo di prova a bassa velocità.
-Nel 1993 viene pubblicato la norma ISO 11898 che definisce come standard il protocollo CAN ad alta velocità (CAN 2.0 A).
-Nel 1995 nasce la norma per il protocollo esteso (CAN 2.0 B)
Cosa è un sistema CAN
CAN è l’acronimo di Control Area Network e definisce un vero e proprio protocollo di rete di bordo proprio come avviene nelle reti LAN per i personal computer.
In pratica un singolo doppino che fa da BUS collega tra loro tutte le centraline di bordo del veicolo, quindi queste possono dialogare tra loro scambiandosi vari tipi di informazione.
Questo tipo di connessione di rete lavora in modalità multimaster-multislave, cioè le unità connesse al bus (dette nodi) lavorano o come master, inviando e ricevendo informazioni, o come slave, ricevendo soltanto informazioni e fornendone a richiesta.
Il protocollo CAN stabilisce la struttura del pacchetto di informazioni che deve viaggiare sulla rete secondo i seguenti criteri:
Start: inizio del pacchetto dati
ID: identificatore del messaggio
Comandi: tipo di messaggio
Dati: pacchetto dati trasmessi
CRC: codice rilevamento errori
End data, Acknowledge e End frame: informazioni di chiusura del pacchetto dati
Oggi le reti di comunicazione veicolare vengono classificate nelle seguenti tre classi:
A: fino a 10Kbps per applicazioni di carrozzeria (alzacristalli, chiusura centralizzata, ecc.)
B: da 50Kbps a 125Kbps per applicazioni di plancia (climatizzatore, strumentazione di bordo, ecc.)
C: da 125Kbps a 1Mbps per applicazioni vano motore (centralina gestione motore, ABS/ESPControllo elettronico della stabilità. L’ESP stabilizza a…, ecc.)
Appare evidente che la differenziazione è fatta per rilevanza e criticità dei sistemi coinvolti.
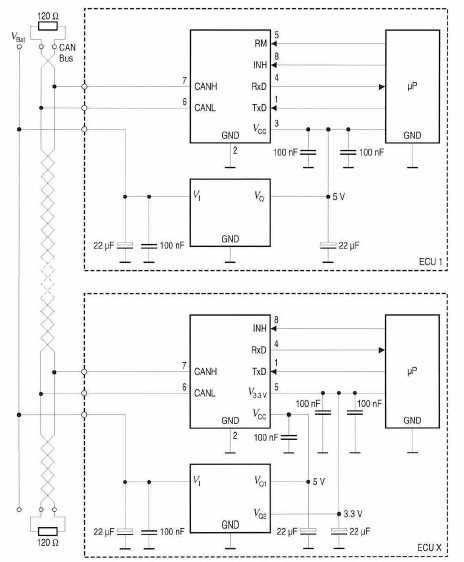
Come già detto, il bus è composto da un doppino che connette tutti i sottosistemi del veicolo. Essendo un BUS occorre che ai suoi estremi vi sia un adattatore di impedenza, qualcosa di molto simile a ciò che nelle vecchie reti LAN con connessioni BNC veniva chiamato “terminatore”.
Questo adattamento di impedenza è realizzato con due resistenze elettriche da 120 ohm ciascuna poste una nella prima e una nell’ultima centralina connessa (Figura 1), queste resistenze sono misurabili con un semplice multimetro.
Funzionamento
Come esempio, si supponga di accendere o di spegnere una luce.
Brevemente viene illustrato il principio dello scambio dati: il comando parte da un interruttore sul pannello di e (in questo caso digitale) che è l’input di una porta I/O del microprocessore del pannello o del nodo. Dal microprocessore di I/O inizia la trasformazione dell’informazione in una sequenza di messaggi da caricare. Ovviamente il “come trattare” e il “cosa fare” dell’input ricevuto dalla porta I/O, viene indicato dal software (creato dall’utente) del microprocessore o viene il tutto realizzato per mezzo di interfaccie a livello software programmabili a piacere dall’utente finale. Esiste un formato standard (imposto da specifiche) per la formazione della sequenza dei messaggi che qui non è il caso di analizzare. Questa sequenza, attraverso il Bus, raggiunge l’identificatore programmato nodo e dopo la sua decodifica (il processo inverso al precedente), viene inviato di conseguenza, alla porta I/O del microprocessore del nodo remoto, un segnale digitale il quale, applicato al gate di un MOSFET, chiude o apre il circuito di potenza della lampada.
Al momento della trasmissione dei dati il CAN non si indirizza a nodi precisi, ma il contenuto di una comunicazione viene contrassegnato da un identificatore inequivocabile in tutta la rete. Tutti i micro “leggono” il messaggio ma, solamente il corrispondente (per il quale è stato programmato) risponde e decodifica il contenuto.
A livello software è anche possibile programmare per ogni identificatore la priorità del messaggio e l’assegnazione del Bus, quando ci sono più nodi che concorrono per il diritto di accesso allo stesso Bus.
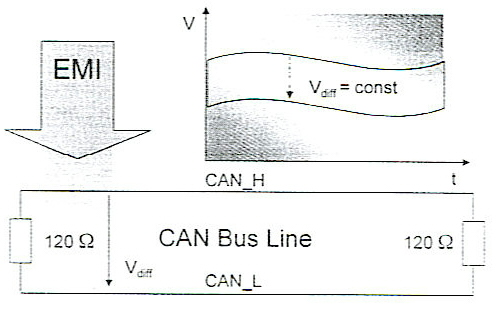
Dato che sui veicoli la carrozzeria fa da massa comune per tutti i dispositivi, potrebbe sembrare sufficiente un solo cavo per portare l’informazione. In realtà, trattandosi di segnali digitali che si propagano su una lunga linea, questi sarebbero troppo esposti a radiodisturbi, utilizzando invece due linee tra cui viene creata una differenza di potenziale, il disturbo diventa pressoché ininfluente perché interferendo con entrambe la differenza di potenziale complessiva rimane invariata e il segnale quindi si conserva.
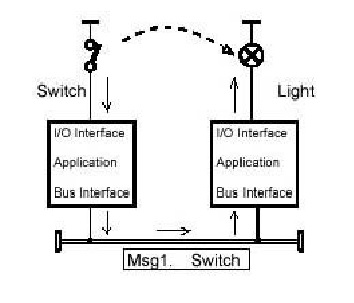
Figura 3
Esempio di disturbo elettromagnetico sul doppino e andamento della tensione relativa.
Verifica efficienza
Un modo semplice per verificare l’efficienza di una linea CAN (almeno dal punto di vista fisico) è, come già detto, di misurare la resistenza elettrica tra i due fili del doppino, ovviamente a quadro spento.
Se la linea è integra misurerete 60 ohm, questo perché avremo le due resistenze terminatrici di Figura 1 connesse praticamente in parallelo. Poiché queste resistenze si trovano nella prima e nell’ultima centralina facente parte del sistema, allora l’intera linea dovrà essere intera per avere effettivamente questa misura.
In pratica il doppino è composto da due linee, una denominata H e una L (high e low), per indicare il bit 0 entrambe le linee restano a 2,5V quindi con differenza di potenziale di 0V, mentre il bit 1 viene indicato portando la linea H sopra i 3,5V e la linea L sotto 1,5V con una differenza di potenziale tra le linee di almeno 2V.
Questo segnale può essere visualizzato su un oscilloscopio da laboratorio o può essere analizzato con uno specifico analizzatore di traffico di rete.
Allo stato attuale, non sembra esistere ancora uno strumento in grado di interpretare i segnali viaggianti sulla linea e dirci cosa si stanno dicendo le centraline tra loro. L’unica cosa che possiamo sperare è di sapere quale protocollo usano (CAN A o B) e a quale velocità comunicano.

Configurazione di una Linea CAN
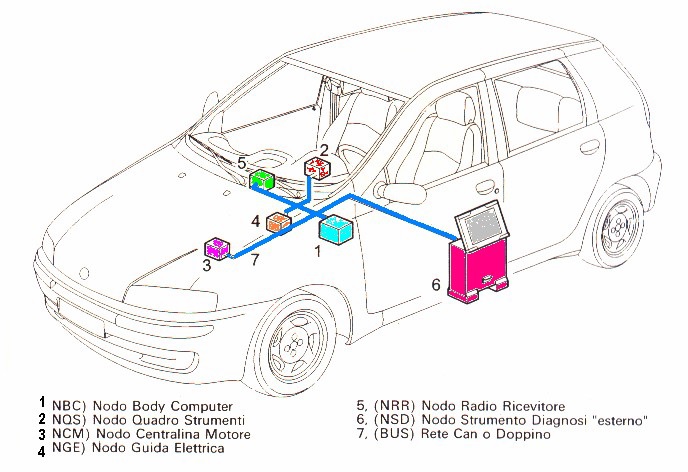
Sulla FIAT Punto il sistema può essere rappresentato come nella Figura 5.
In questa configurazione soltanto il Body Computer ha funzioni di master e coordina il funzionamento di tutte le altre centraline.
Tutti sappiamo che oggi l’autoriparatore è dotato di strumenti di autodiagnosi in grado di interfacciarsi con le centraline di bordo. Con la linea CAN questo concetto si esaspera fino a integrare lo strumento di diagnosi nel sistema CAN quindi quando tale strumento viene connesso esso sarà in grado di comunicare con tutti i sistemi di bordo sempre tramite la stessa linea mentre tradizionalmente sarebbe stato necessario cambiare fisicamente presa di connessione da un punto all’altro del veicolo per comunicare con le diverse centraline.
Poiché il Body computer deve conoscere la configurazione del sistema per funzionare, quando viene sostituito devono essere eseguite delle procedure di riallineamento che, pur essendo del tutto automatiche, possono essere eseguite solo tramite uno strumento di autodiagnosi.
Uno degli errori che è possibile diagnosticare con gli strumenti di autodiagnosi e che sta mettendo maggiormente in crisi l’autoriparatore è “Errore LINEA CAN”.
Quando compare questo errore diventa veramente difficile per chi non abbia una approfondita conoscenza dell’elettronica analogica e digitale venire a capo di un tale problema.
La formazione professionale in questi casi diventa indispensabile.
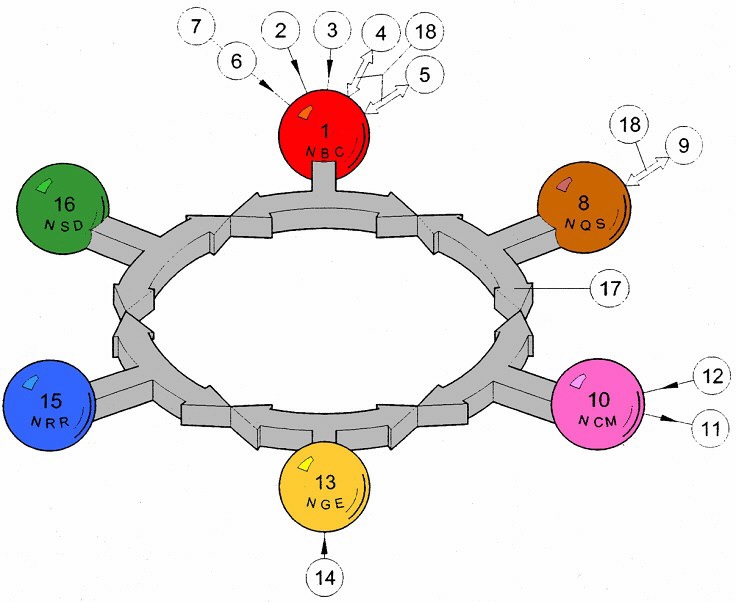
Schema VeNICE su FIAT con protocollo CAN
1. (NBC) Nodo Body Computer
2. Plancetta comandi
3. Devio guida
4. Modulo sirena allarme
5. Modulo sensori volumetrici (allarme)
6. Centralina ABS
7. Sensori ABS
8. (NQS) Nodo Quadro Strumenti
9. Centralina cambio automatico
10. (NCM) Nodo Controllo Motore
11. Attuatori NCM
12. Sensori NCM
13. (NGE) Nodo Guida Elettrica
14. Sensore di coppiaCertificato Prevenzione Incendi NGE
15. (NRR) Nodo Radio o Radionavigatore
16. (NSD) Nodo Strumento di Diagnosi
17. Rete CAN
18. Linea seriale